Motor control implementation. More...
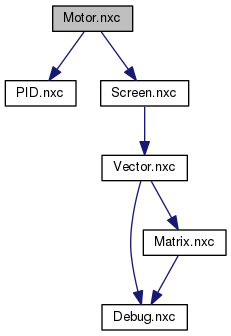
Include dependency graph for Motor.nxc:
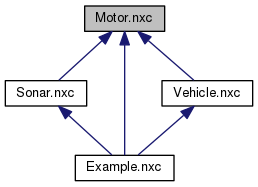
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | MotorStart (int motor, int power) |
| Starts the given motor with the given power. | |
| void | MotorStop (int motor) |
| Stops the given motor. | |
| void | MotorSetPower (int motor, int power) |
| Set the power of given motor. | |
| void | MotorStartSync (int motor1, int motor2, int power) |
| Starts the given 2 motors in synchronous mode with with the given initial power. More... | |
| void | MotorStopSync (int motor1, int motor2) |
| Stops the given two motor pair. | |
| void | MotorSetPowerSync (int motor1, int motor2, int power) |
| Sets the power of the given motor pair. | |
| void | MotorSetTurnRatio (int motor1, int motor2, int turnRatio) |
| Sets the turn ratio of the given motor pair running in synchronous mode. | |
| void | MotorSetTurnRatioPower (int motor1, int motor2, int turnRatio, int power) |
| Sets the turn ratio and power at the same time of the given motor pair running in synchronous mode. | |
| int | MotorRotateAngle (int motor, int power, long angle, long PValue, long IValue, long DValue) |
| Rotates the given motor by given angle using the specified P, I and D gain values. The power is the maximum power to use for rotation. | |
| int | MotorRotateAngleSync (int motor1, int motor2, int power, long angle, long PValue, long IValue, long DValue) |
| Rotates the given pair of motors synchromously (that is they rotate at the same pace) by given angle using the specified P, I and D gain values. The power is the maximum power to use for rotation. | |
| int | MotorRotateAngleDiff (int motor1, int motor2, int power, long angle, long PValue, long IValue, long DValue) |
| Rotates the given pair of motors differentially (that is they rotate at the same pace in opposite direction) by given angle using the specified P, I and D gain values. The power is the maximum power to use for rotation. | |
Detailed Description
Motor control implementation.
Definition in file Motor.nxc.
Function Documentation
|
inline |
Starts the given 2 motors in synchronous mode with with the given initial power.
Synchronous mode keeps the two motors go with the same rotation counts – effectively keeping the drive go straight line.
Definition at line 71 of file Motor.nxc.
Referenced by MotorRotateAngleDiff(), MotorRotateAngleSync(), VehicleAddNavPoint(), VehicleAddNavPoints(), and VehicleContinue().