A 2D map implementation that holds a set of landmark objects. More...
Go to the source code of this file.
Data Structures | |
| struct | Map |
| Map class to hold a collection of landmarks. More... | |
Functions | |
| void | MapArrayLandmarks (Map &map, long &landmarks[]) |
| Initializes the Map with an array of landmarks. The array has alternate x and y positions of the landmarks. | |
| void | MapAddLandMark (Map &map, int x, int y) |
| Adds a landmark (x,y) to the map. | |
| int | MapGetNumLandmarks (Map &map) |
| Returns the number of landmarks currently present in the map. | |
| void | MapGetLandmark (Map &map, int index, Vector &vec) |
| Gets a landmark at the given index and returns it in the provide vector. | |
| bool | MapFindNearestLandmarkAtAngle (Map &map, Vector &reference, int minAngle, int maxAngle, Vector &retLandmark) |
| Finds the nearest landmark around the reference vector within the bounds of given minAngle and maxAngle from the reference vector. More... | |
| bool | MapFindTriangulationLandmarks (Map &map, Vector &reference, int minAngle, int maxAngle, Vector &landmark1, Vector &landmark2) |
| Finds two nearest landmarks around the reference vector within the bounds of given minAngle and maxAngle from the reference vector, that can be used for location triangulation. More... | |
| bool | MapFindNearestLandmark (Map &map, Vector &reference, Vector &retLandmark) |
| Finds the nearest landmard around the reference vector. More... | |
Detailed Description
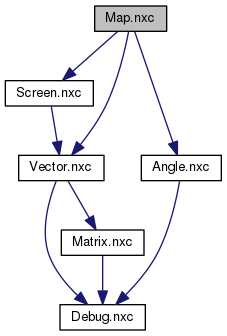
A 2D map implementation that holds a set of landmark objects.
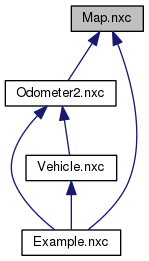
Definition in file Map.nxc.
Function Documentation
Finds the nearest landmard around the reference vector.
If a landmark is found, returns true and retLandmark is set, otherwise false is returned and retLandmark is not set.
Definition at line 198 of file Map.nxc.
References MapGetLandmark(), MapGetNumLandmarks(), VectorGetDistance(), and VectorSubtract().
| bool MapFindNearestLandmarkAtAngle | ( | Map & | map, |
| Vector & | reference, | ||
| int | minAngle, | ||
| int | maxAngle, | ||
| Vector & | retLandmark | ||
| ) |
Finds the nearest landmark around the reference vector within the bounds of given minAngle and maxAngle from the reference vector.
If a landmark is found, returns true and retLandmark is set, otherwise false is returned and retLandmark is not set. minAngle is angle bound on the right side of the search, and maxAngle is angle bound on the left side (because angle increses on anti-clockwise). minAngle and maxAngle values have nothing to do with their numerical min or max values, but rather refers to their orientation in the plane. minAngle and maxAngle are abosulute angle on the map (0 .. 360) and theta component in the referece vector is not used.
Definition at line 93 of file Map.nxc.
References MapGetLandmark(), MapGetNumLandmarks(), VectorGetAngleVec(), VectorGetDistanceVec(), and VectorSubtract().
Referenced by MapFindTriangulationLandmarks().
| bool MapFindTriangulationLandmarks | ( | Map & | map, |
| Vector & | reference, | ||
| int | minAngle, | ||
| int | maxAngle, | ||
| Vector & | landmark1, | ||
| Vector & | landmark2 | ||
| ) |
Finds two nearest landmarks around the reference vector within the bounds of given minAngle and maxAngle from the reference vector, that can be used for location triangulation.
If suitable landmarks are found, returns true and landmark1 and landmark2 are set, otherwise false is returned and the vectors are not set.
Definition at line 141 of file Map.nxc.
References AngleAbsAdd(), AngleAbsSub(), and MapFindNearestLandmarkAtAngle().