Vehicle class representing a 2 wheels drive vehicle. More...
Data Fields | |
| int | maxPower |
| int | minPower |
| int | accelPower |
| int | brakePower |
| int | currentPower |
| int | maxSteerFactor |
| int | currentSteerFactor |
| int | stabilityFactor |
| int | motorLeft |
| int | motorRight |
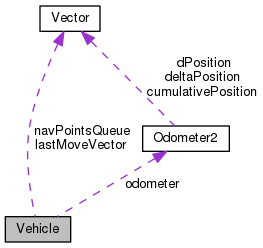
| Odometer2 | odometer |
| Vector | navPointsQueue [] |
| int | navPoint |
| int | navPointLast |
| int | maxNavPoints |
| int | lookaheadDistance |
| Vector | lastMoveVector |
| bool | pause |
Detailed Description
Vehicle class representing a 2 wheels drive vehicle.
Definition at line 52 of file Vehicle.nxc.
Field Documentation
| int Vehicle::accelPower |
Acceleration per step >
Definition at line 56 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetAcceleration(), and VehicleUpdatePowerAndSteer().
| int Vehicle::brakePower |
Braking per step >
Definition at line 57 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetAcceleration(), and VehicleUpdatePowerAndSteer().
| int Vehicle::currentPower |
Currently set power to the motors >
Definition at line 58 of file Vehicle.nxc.
Referenced by VehicleInit(), VehiclePause(), and VehicleUpdatePowerAndSteer().
| int Vehicle::currentSteerFactor |
Current steering factor set to the motors >
Definition at line 60 of file Vehicle.nxc.
Referenced by VehicleInit(), and VehicleUpdatePowerAndSteer().
| Vector Vehicle::lastMoveVector |
Last vector moved >
Definition at line 70 of file Vehicle.nxc.
Referenced by VehicleGetLookahead(), VehicleInit(), and VehicleStep().
| int Vehicle::lookaheadDistance |
Look ahead distance for path following >
Definition at line 69 of file Vehicle.nxc.
Referenced by VehicleGetLookahead(), VehicleInit(), VehicleSetLookaheadDistance(), and VehicleStep().
| int Vehicle::maxNavPoints |
Maximum amount of navigation points in queue >
Definition at line 68 of file Vehicle.nxc.
Referenced by VehicleAddNavPoint(), VehicleAddNavPoints(), and VehicleInit().
| int Vehicle::maxPower |
Maximum power the vehicle is allowed to take >
Definition at line 54 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetDynamics(), VehicleSteerToAngle(), and VehicleUpdatePowerAndSteer().
| int Vehicle::maxSteerFactor |
Maximum steering factor Vehicle is allowed >
Definition at line 59 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetDynamics(), VehicleStep(), and VehicleUpdatePowerAndSteer().
| int Vehicle::minPower |
Minimum power during steering >
Definition at line 55 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetDynamics(), and VehicleUpdatePowerAndSteer().
| int Vehicle::motorLeft |
The left motor of the wheel >
Definition at line 62 of file Vehicle.nxc.
Referenced by VehicleAddNavPoint(), VehicleAddNavPoints(), VehicleContinue(), VehicleInit(), VehiclePause(), VehicleSteerToAngle(), VehicleStep(), and VehicleUpdatePowerAndSteer().
| int Vehicle::motorRight |
The right motor of the wheel >
Definition at line 63 of file Vehicle.nxc.
Referenced by VehicleAddNavPoint(), VehicleAddNavPoints(), VehicleContinue(), VehicleInit(), VehiclePause(), VehicleSteerToAngle(), VehicleStep(), and VehicleUpdatePowerAndSteer().
| int Vehicle::navPoint |
Currently executing navigation point >
Definition at line 66 of file Vehicle.nxc.
Referenced by VehicleGetLookahead(), VehicleInit(), and VehicleStep().
| int Vehicle::navPointLast |
Last navigation point in queue >
Definition at line 67 of file Vehicle.nxc.
Referenced by VehicleAddNavPoint(), VehicleAddNavPoints(), VehicleGetLookahead(), VehicleInit(), and VehicleStep().
| Vector Vehicle::navPointsQueue[] |
Navigation points queue >
Definition at line 65 of file Vehicle.nxc.
Referenced by VehicleAddNavPoint(), VehicleAddNavPoints(), VehicleGetLookahead(), VehicleInit(), and VehicleStep().
| Odometer2 Vehicle::odometer |
Odometer used to position in 2D plane >
Definition at line 64 of file Vehicle.nxc.
Referenced by VehicleGetLookahead(), VehicleInit(), VehicleSteerToAngle(), and VehicleStep().
| bool Vehicle::pause |
Pause state of vehicle >
Definition at line 71 of file Vehicle.nxc.
Referenced by VehicleContinue(), VehicleInit(), VehiclePause(), and VehicleStep().
| int Vehicle::stabilityFactor |
Inverse relationship of power and steering >
Definition at line 61 of file Vehicle.nxc.
Referenced by VehicleInit(), VehicleSetDynamics(), and VehicleUpdatePowerAndSteer().
The documentation for this struct was generated from the following file: